
 English
English Deutsch
Deutsch Français
Français







Llámenos
+86-18023576732
+86-0579-89008006
Fax: +86-0579-82206899
Nuestro equipo se enorgullece de ofrecer garantía de puntualidad y garantía de producto para la satisfacción del cliente.
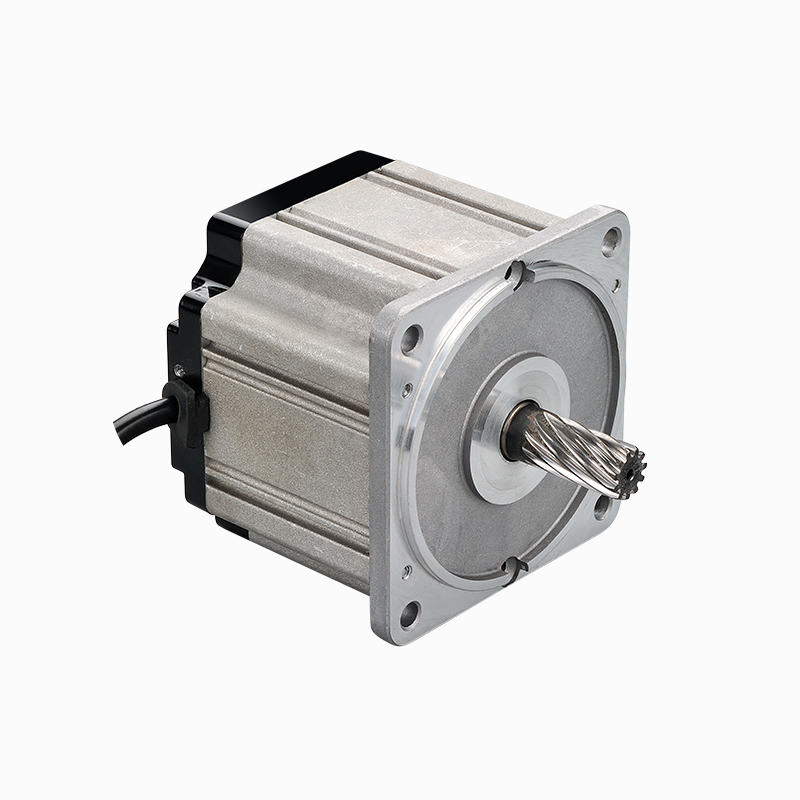
Leer másLos motores eléctricos están diseñados para proporcionar energía mecánica en una amplia gama de velocidades de funcionamiento, y una de las consideraciones importantes en el diseño del sistema es cómo se comportan cuando se ejecutan a bajas velocidades. El Motor DC de imán permanente Durante mucho tiempo ha sido valorado por su alta densidad de par, control sencillo y estructura relativamente compacta. Sin embargo, cuando se operan a bajas velocidades, sus características de estabilidad se cuestionan. Los ingenieros e integradores del sistema deben examinar si el motor puede mantener un par constante, evitar una vibración excesiva y garantizar una rotación suave para cumplir con los requisitos de aplicación.

Características de par a bajas velocidades
Una característica definitoria de la operación de baja velocidad es el equilibrio entre la producción de par y la entrada de corriente. A velocidades más bajas, la fuerza electromotiva posterior disminuye, lo que significa que el flujo de corriente se vuelve más influyente para determinar la salida de par. Esto permite que el motor genere un par sustancial, pero también aumenta el riesgo de inestabilidad si la corriente no está regulada cuidadosamente. En sistemas bien diseñados, el motor demuestra una salida de torque estable con fluctuaciones mínimas. Sin embargo, en los casos en que la demanda de carga varía abruptamente, la ondulación de torque puede volverse más notable, lo que puede influir en aplicaciones de precisión como robótica o sistemas de posicionamiento.
Impacto de las pérdidas mecánicas y eléctricas
Las pérdidas mecánicas, como la fricción y el viento, son relativamente constantes independientemente de la velocidad, mientras que las pérdidas eléctricas están influenciadas por la magnitud de la corriente requerida. A velocidades muy bajas, las pérdidas mecánicas tienen una mayor importancia en relación con la potencia de salida general del motor, lo que puede reducir la estabilidad aparente. Además, la conmutación se vuelve más crítica porque el cambio de corriente entre los devanados ocurre con menos frecuencia. El mal diseño de conmutación o los cepillos usados pueden causar pulsos de torque desiguales o ligeros idiotas, lo que a su vez compromete la percepción de la operación suave. Por lo tanto, mantener el motor en una condición adecuada es esencial para lograr un rendimiento confiable de baja velocidad.
Influencia de las estrategias de control
Las técnicas de control modernas han mejorado significativamente la estabilidad del motor a velocidades más bajas. La modulación del ancho de pulso, el control de velocidad de circuito cerrado y los mecanismos de retroalimentación de torque se usan comúnmente para garantizar un rendimiento estable. Al monitorear y ajustar la corriente en tiempo real, estos sistemas mitigan la ondulación de torque y permiten un movimiento rotacional más suave. Esto es particularmente importante en aplicaciones que requieren alta precisión, como unidades de transporte, equipos de automatización a pequeña escala o dispositivos médicos, donde incluso una leve inestabilidad pueden tener consecuencias significativas. Por lo tanto, la efectividad de la estabilidad de baja velocidad a menudo depende no solo del diseño del motor en sí sino también de la sofisticación de su sistema de control.
Consideraciones específicas de la aplicación
Diferentes industrias exigen diversos grados de estabilidad de baja velocidad. Por ejemplo, en el equipo de manejo de materiales, las ligeras fluctuaciones de par pueden ser aceptables siempre que la entrega general de energía permanezca suficiente. Por otro lado, en los brazos robóticos por servo, incluso la inestabilidad puede reducir la precisión y la eficiencia. Los factores ambientales, como la temperatura de funcionamiento y la consistencia de la carga, también juegan un papel. Cuando los motores están sujetos a ciclos de inicio frecuentes a bajas velocidades, pueden surgir tensiones adicionales, destacando la importancia del diseño robusto y el manejo térmico apropiado. Al considerar el entorno de aplicación específico, los ingenieros pueden evaluar si las características de baja velocidad de un motor determinado cumplen con los requisitos operativos.
La estabilidad de un motor durante la operación de baja velocidad es un problema multifacético influenciado por las características del par, las pérdidas mecánicas y eléctricas, las estrategias de control y la naturaleza de la aplicación en sí. El motor de CC Magnet permanente es capaz de rendimiento estable en condiciones de baja velocidad cuando está diseñado, controlado y mantenido adecuadamente. Sin embargo, sin una regulación adecuada o si está presente el desgaste mecánico, la inestabilidad puede manifestarse en forma de ondulación de par, vibración o rotación desigual. Una comprensión integral de esta dinámica permite a los ingenieros adaptar a los sistemas que ofrecen fiabilidad y eficiencia, asegurando que los motores cumplan sus roles previstos en un amplio espectro de aplicaciones.

+86-18023576732
+86-0579-89008006
Fax: +86-0579-82206899


Zona industrial de Bailongqiao Dongxi, distrito de Wucheng, Jinhua, Zhejiang, China.
De lunes a viernes, le responderemos o nos llamaremos dentro de las 12 horas después de recibir la consulta.
Introducción a la reducción de engranajes en puertas de b...

Selección de motor de engranaje para silla de ruedas E...
Derecho de autor © Zhejiang Norton Motor Co., Ltd. Apoyo técnico.


Contáctenos